
 产品:12
产品:12
 联系我们
联系我们

ABB机器人包装拆解及安装流程
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
ABB工业机器人拆包装的操作
①.ABB机器人到达现场后,第 一时间检查外观是否有破 损,是否有进水等等异常 情况。如果有问题请马上 联系厂家及物流公司进行处理。

②.使用合适的工具剪断箱子上的两条钢扎带。

ABB工业机器人拆包装的操作
③.将剪断的钢扎带取走。

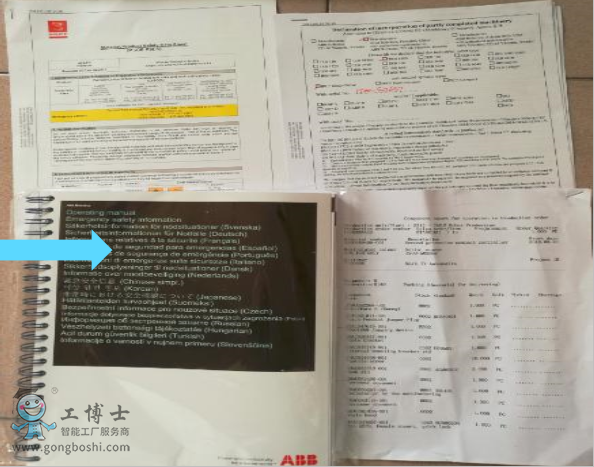
③.随机的文档:SMB电池 安全说明、出厂清单、基本 操作说明书和装箱单。
ABB工业机器人清点标准装箱物品
①.以ABB机器人IRB1200 为例,包括4个主要物品: 机器人本体、示教器、线缆 配件及控制柜

②.两个纸箱打开后,展开 的内容物③.随机的文档:SMB电池 安全说明、出厂清单、基本 操作说明书和装箱单。
ABB机器人本体与控制柜安装
①.将控制柜从底座上安放 到机器人工作台下面去。
②.使用扳手拆掉将机器人 固定在底座上的螺丝。一共 有4枚
③.将ABB机器人安装到机器人 工作台,并且坚固到机器人本体底盘上的4颗螺丝。然 后,将固定机器人姿态的支架拆卸



②.使用扳手拆掉将机器人 固定在底座上的螺丝。一共 有4枚
③.将ABB机器人安装到机器人 工作台,并且坚固到机器人本体底盘上的4颗螺丝。然 后,将固定机器人姿态的支架拆卸
ABB机器人本体与控制柜电气连接
①.ABB机器人本体与控制柜之 间需要连接三条电缆: A:动力电缆 B:SMB电缆 C:示教器电缆
②.将动力电缆标注为XP1 的插头接入控制柜,如图所示。
③.将动力电缆标为R1.MP 的插头接入机器人本体底座 的插头上,如图所示
④.将SMB电缆(直头)接 头插入到控制柜XS2端口
⑤.将SMB电缆(弯头)接 头插入到机器人本体底座 SMB端口
⑥.将示教器电缆(红色) 的接头插入到控制柜XS4端 口
⑦.此项目中IRB1200是使 用单相220V供电,功率0.5kw。根据此参数,准 备电源线并且制作控制柜端 的接头。
⑧.将电源线根据定义进行 接线,一定要将电线涂锡后 插入接头压紧
⑨.已制作好的电源线如图 所示
⑩.在检查后,将电源接头 插入控制柜XP0端口并锁紧。
11 .将示教器支架安装到合 适的位置,然后将示教器说 放好。
④.将SMB电缆(直头)接 头插入到控制柜XS2端口
⑤.将SMB电缆(弯头)接 头插入到机器人本体底座 SMB端口
⑥.将示教器电缆(红色) 的接头插入到控制柜XS4端 口
⑦.此项目中IRB1200是使 用单相220V供电,功率0.5kw。根据此参数,准 备电源线并且制作控制柜端 的接头。
⑧.将电源线根据定义进行 接线,一定要将电线涂锡后 插入接头压紧
⑨.已制作好的电源线如图 所示
⑩.在检查后,将电源接头 插入控制柜XP0端口并锁紧。
11 .将示教器支架安装到合 适的位置,然后将示教器说 放好。
在此处联系我们或致电与我们联系,以获取有关机器人解决方案的快速简便的报价。
了解更多ABB喷涂机器人,ABB焊接机器人,请咨询:ABB码垛机器人
- 下一篇:ABB机器人安全防护装置有哪些
- 上一篇:ABB机器人警报图标