
 产品:12
产品:12
 联系我们
联系我们

IRB 6790平衡装置的点检
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
ABB机器人新一代清洗专家IRB 6790平衡装置的点检——ABB机器人

原创 ABB机器人大学 ABB机器人 2019-12-24
ABB第三代FoundryPrime铸造机器人IRB 6790具备IP69防水防尘等级,可针对严苛和潮湿环境中常见的高温、清洁高压、化学物质和灰尘提供增强防护,无需额外配备复杂的防护罩。由于清洁或清洗过程中的洗涤剂PH值高达10,铸造机器人采用高度耐化学腐蚀设计。此外,机器人的全部外表面还采用涂层处理或者采用不锈钢材质,以防腐蚀。第三代FoundryPrime铸造机器人可承受100%湿度和典型清洁应用的水蒸气,确保产品在侵蚀性清洁操作下仍具有较长使用寿命。
平衡装置的检查周期一般为1年一次。
在检查过程中,应当对平衡装置的如图几个点进行检查。
进入机器人工作区域之前,关闭所有连接到机器人的电源。
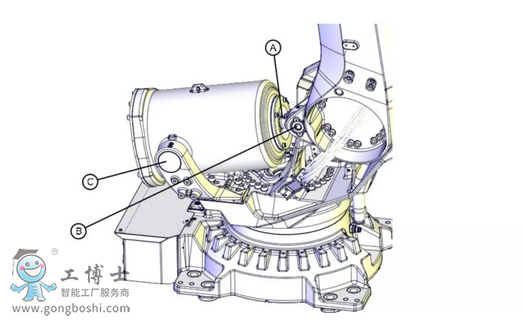
前轴承维修包物料号:3HAC064119-001
后轴承维修包物料号:3HAC064403-001
检查前后轴承连接处状态。
在机器人手臂移动过程中,检查平衡装置的内是否有异响。
检查活塞杆的前后部润滑情况。
平衡装置的前侧孔需要用润滑脂进行润滑。
O型圈、径向密封等处不得出现润滑油脂泄漏,一旦出现泄露必须立即处理以避免损坏轴承。
清理前侧孔区域以避免污染。
检查前轴承O型圈和径向密封环周围的区域是否存在泄漏。
如果检查到泄漏,请更换 O型圈和径向密封环
检查在框架内是否有可能阻碍平衡装置自由移动的障碍物。
保持平衡装置的周围干净,无异物,比如检修工具。
- 下一篇:ABB机器人弧焊起弧失败处理方式
- 上一篇:四种喷漆房的介绍